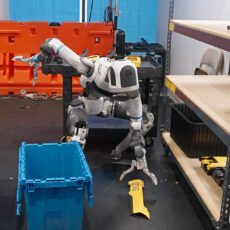
Boston Dynamics is finishing up a long chapter in the Atlas robot’s existence before shifting its focus to the electric production model that will be used on the factory floor. The company collaborated with the Robotics & AI Institute to push this robot’s full-body movement and control capabilities one last time.
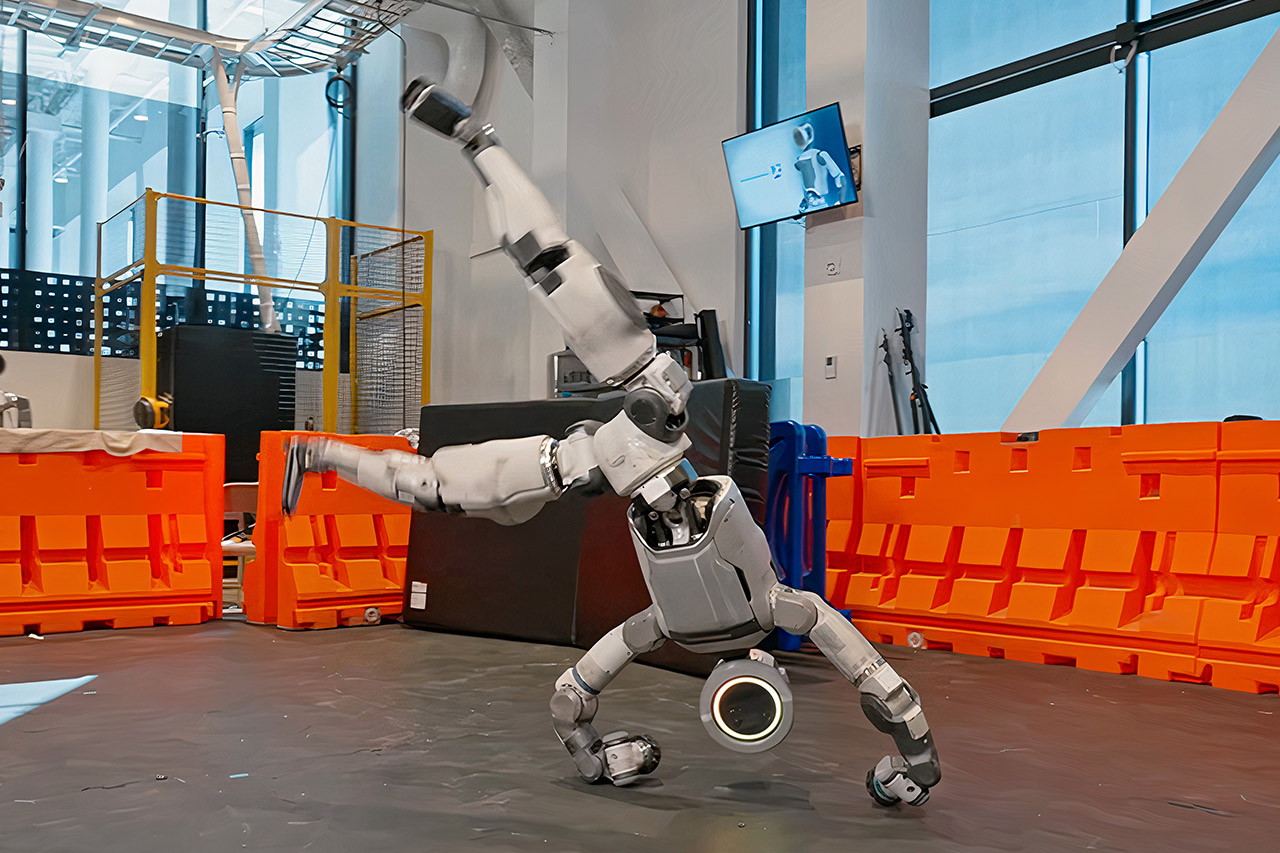
The test begins with Atlas strolling around an open area, moving its legs in a manner that is quite similar to how humans walk, but things rapidly become much more fascinating and demanding when it attempts a cartwheel. Atlas moves cleanly sideways, with its arms and legs functioning in perfect harmony to maintain motion. The cartwheel transitions into a backflip. The robot tucks its body and spins in the air, arms and legs still in perfect sync, before landing smoothly on both feet. Even when spinning through the air, the robot remains tight and controlled, and when it falls, the impact is absorbed so it does not simply collapse.

- Sleek & Durable Design: Standing at 132cm tall and weighing only approx. 35kg, the G1 is constructed with aerospace-grade aluminum alloy and carbon...
- High Flexibility & Safe Movement: Boasting 23 joint degrees of freedom (6 per leg, 5 per arm), it offers an extensive range of motion. For safety, it...
- Smart Interaction & Connectivity: Powered by an 8-core high-performance CPU and equipped with a depth camera and 3D LiDAR. It supports Wi-Fi 6 and...

Later on, you can see how effectively Atlas recovers from difficult situation, whether it be jumping onto platforms, clearing gaps, or even when its equilibrium moves unexpectedly. One of the most memorable moments is when the robot takes a step, lands, and then adjusts its foot position before continuing on. These adjustments highlight the precision built within the control software. Some of the runs are smooth and flawless, while others show the robot stumbling and even losing part of its foot cover during a hard landing.

Working with the RAI Institute was an important aspect of the project, and their whole-body learning method paid off handsomely. It allowed the scientists to teach behaviors in simulation that could be applied directly to the physical robot, implying that both everyday walking and these high-speed acrobatics may be performed using the same approaches. This points to computers that can handle a wide range of tasks without requiring distinct programming for each.