
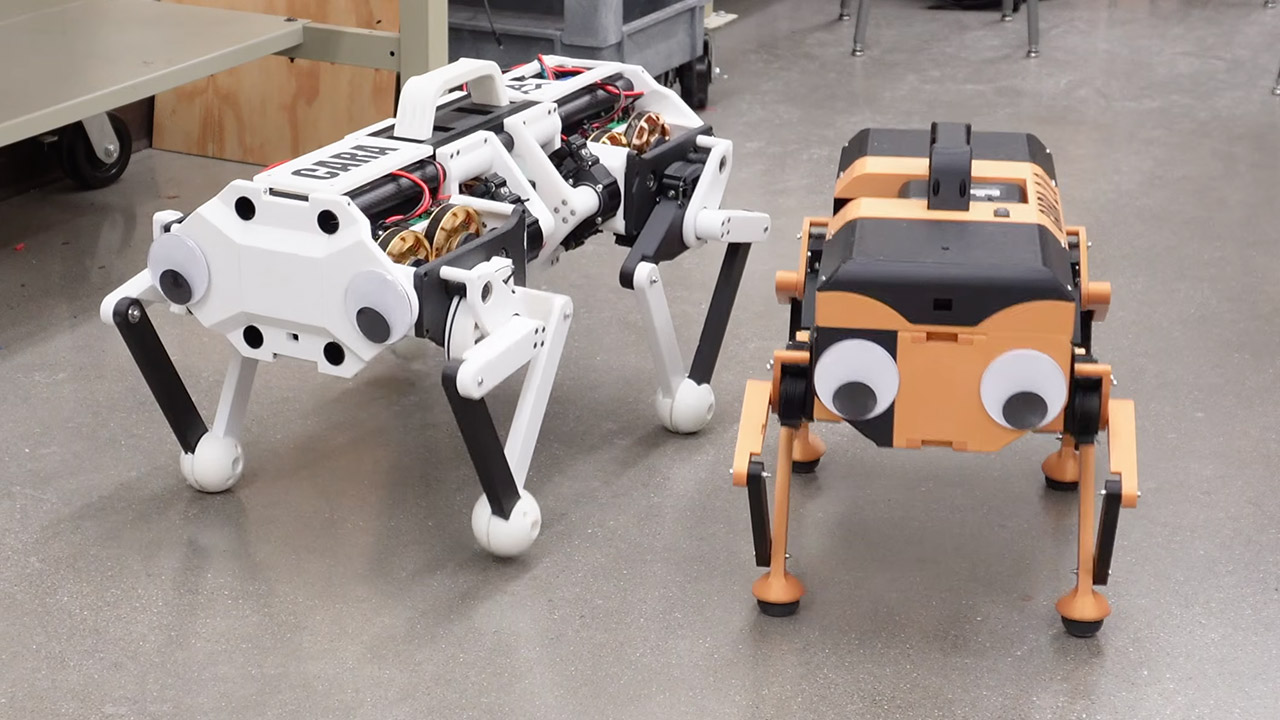
Aaed Musa has spent years poring over his work on robot dogs, experimenting with one project after another. For his senior design project in mechanical engineering, he assembled a small team to build CARA 2.0, a machine that travels far more smoothly and reliably than anything he has previously created. The team set some rather tough goals: keep the entire cost around $1,000, keep the weight under twenty pounds, and ensure that every single component was engineered to withstand repeated use without breaking apart.
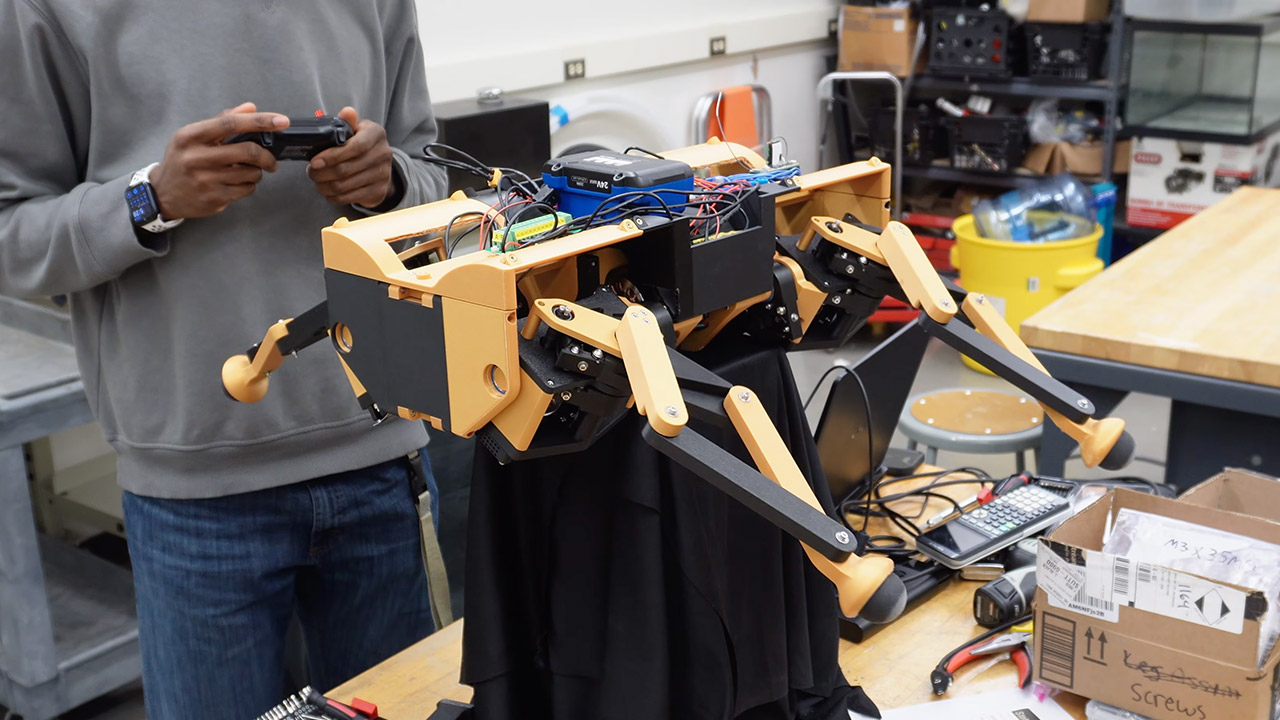
The original CARA had a serious flaw: the joints were powered by bulky capstan drives using ropes and pulleys. Although these were initially less expensive than regular gears, they were ultimately insufficient for the task at hand. Musa and his colleagues decided to take a step back, reconsider the actuators, and see if they could come up with an improved solution. They picked up some inexpensive brushless motors originally made for drones, disassembled them, and rebuilt the coils with more wire turns, this time in the form of a star pattern. That resulted in a seriously impressive tripled torque without adding any additional weight or bulk. The finished actuators had a little controller and a nifty little 9.6 to 1 capstan reduction, and they could produce a stunning 12 newton-meters of peak torque for roughly $80. During testing, one motor continued to run for more than 1000 hours with little wear.

- A1 mini + LED Lamp Kit for Creative Light Projects: Bring your ideas to life with the included LED Lamp Kit. Simply print compatible lamp models and...
- The Perfect 3D Printer for Beginners: A1 mini 3D Printer is designed to make 3D printing easy from day one with automatic calibration, simple setup...
- Experience the Bambu Lab Ecosystem: Access MakerWorld’s huge library of ready-to-print models, manage prints through the Bambu Handy app, and enjoy...
The legs received just as much attention as the actuators, because previous versions featured a five-bar linkage that appeared perfectly symmetrical but wasn’t, as the robot kept sliding to the left anytime it attempted to walk. So the team began from fresh, redrew the lot to make the front and back legs the same, and then double-checked that the left and right pairs were appropriately mirrored. They replaced the printed feet with squash balls, which provided a considerably greater grip on a variety of surfaces and some natural give. Inverse kinematics sorted out the foot location, and cycloid trajectories provided the robot short, quick steps that allowed it to accelerate smoothly. As a result, during testing, scientists were able to persuade the robot to walk straight, move sideways, spin around in circles, crouch, and even jump 4.5 inches into the air.

When they began making some fundamental material selections, the weight simply dropped off. They replaced the expensive carbon fiber tubes with some more cheap three-dimensionally printed PLA components. Electronics were all packaged together in a single box on top, which improved the robot’s balance and reduced wiring. They installed a 24 volt battery pack with 3 amp-hours, which sits low and center, providing approximately an hour of operation while remaining lightweight at 18.2 pounds. The finished robot measures 20.5 inches from nose to tail, 13.9 inches across, and 16.8 inches tall when it’s standing up straight.

There were a few loose ends to tie up on the software side. Since joints do not have their own exact position trackers, current spikes on a motor merely signal it to keep going until it reaches its mechanical limit. When the robot first boots up, the initial startup period appears to be a very normal stretch. The entire system is coordinated by a Teensy microcontroller via a correctly wired CAN bus, which feeds data from a 9-axis IMU to change the robot’s center of mass while it moves, which is critical in dynamic settings. Initially, early iterations of the walk simply fell apart on hills, but the scientists were able to fix this by making some trig-based adjustments to keep the robot stable even when the ground was at an odd angle.
The latest iteration, CARA 2.0, can now travel at 1.8 feet per second, carry a 15-pound load, and remain upright over uneven terrain. Sidewalks, lawns, and modest barriers no longer cause it to come to a halt. The homing sequence, squash balls on its feet, and upgraded motors all work together to provide the robot with a smooth, purposeful movement rather than that jerky, unstable effect.
[Source]







