
A one-legged robot doesn’t exactly shout “transportation revolution,” but the researchers at KAIST’s Dynamic Robotics and Control Lab (DRCD) in South Korea have developed a strange contraption that flips the script on how we think about robotic movement.
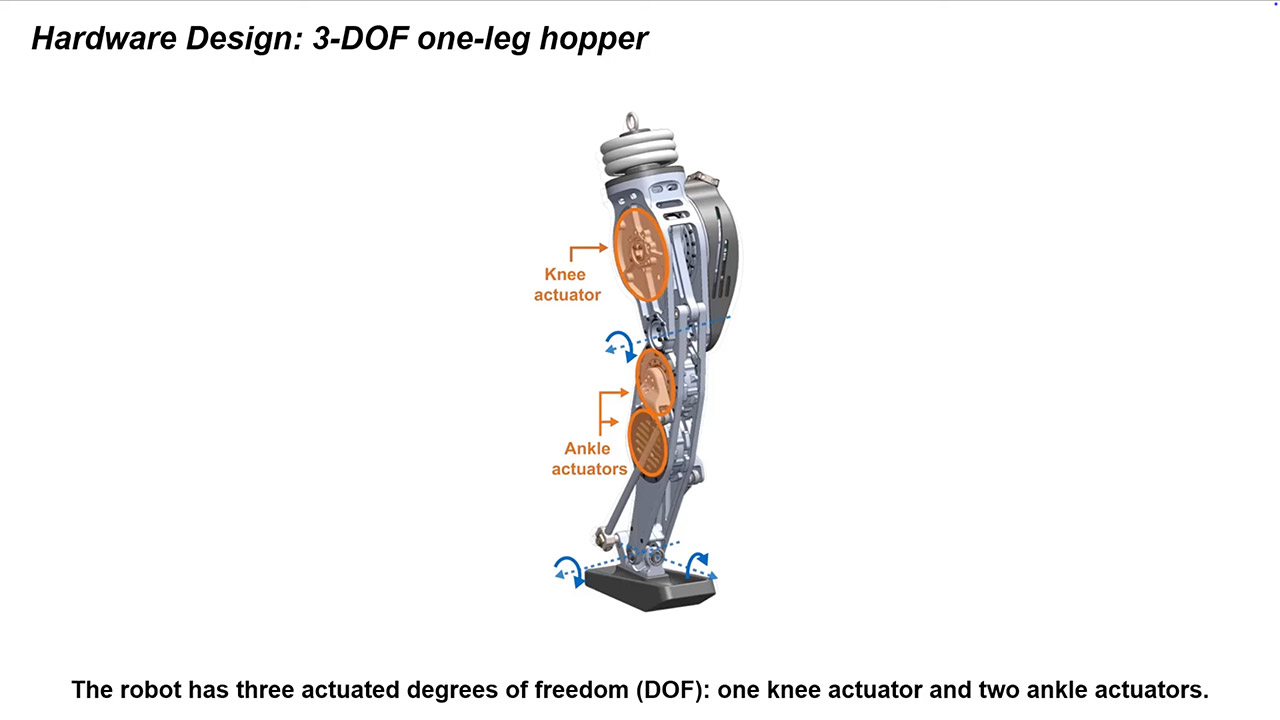
The robot, dubbed the “Single-Legged Robot,” features a sleek leg with a hip, knee, and ankle, driven by custom-designed hardware that’s a standout in its own right. The knee actuator, a complex module with a motor driver and communication interface, powers the bending motion, while two ankle actuators—also custom-built with their own motor drivers and interfaces—handle stability and forward thrust. “Our goal was to deeply understand legged locomotion by starting with the simplest possible system,” Lee shares in the team’s arXiv paper.

- 👍Improved Motor: The 350W motor provides high torque but maintains a low power consumption. The e scooter reaches a top speed of 19mph and can...
- 👍Enhanced Battery: A high-capacity battery, our adult electric scooter offer an extended travel range of 15 miles on a single charge. With a quick...
- 👍Easy to Store & Carry: With the quick folding system, this e-scooter can be easily folded in 1 second to store in the trunk; The scooter is light...
Unlike those flashy bipedal bots strutting through labs or factories, this guy strips things down to tackle one core puzzle—dynamic balance. “By focusing on a single leg, we can explore the fundamental dynamics of locomotion without the interference of multi-limb coordination,” Lee explains, positioning this project as a springboard for bigger robotic breakthroughs.
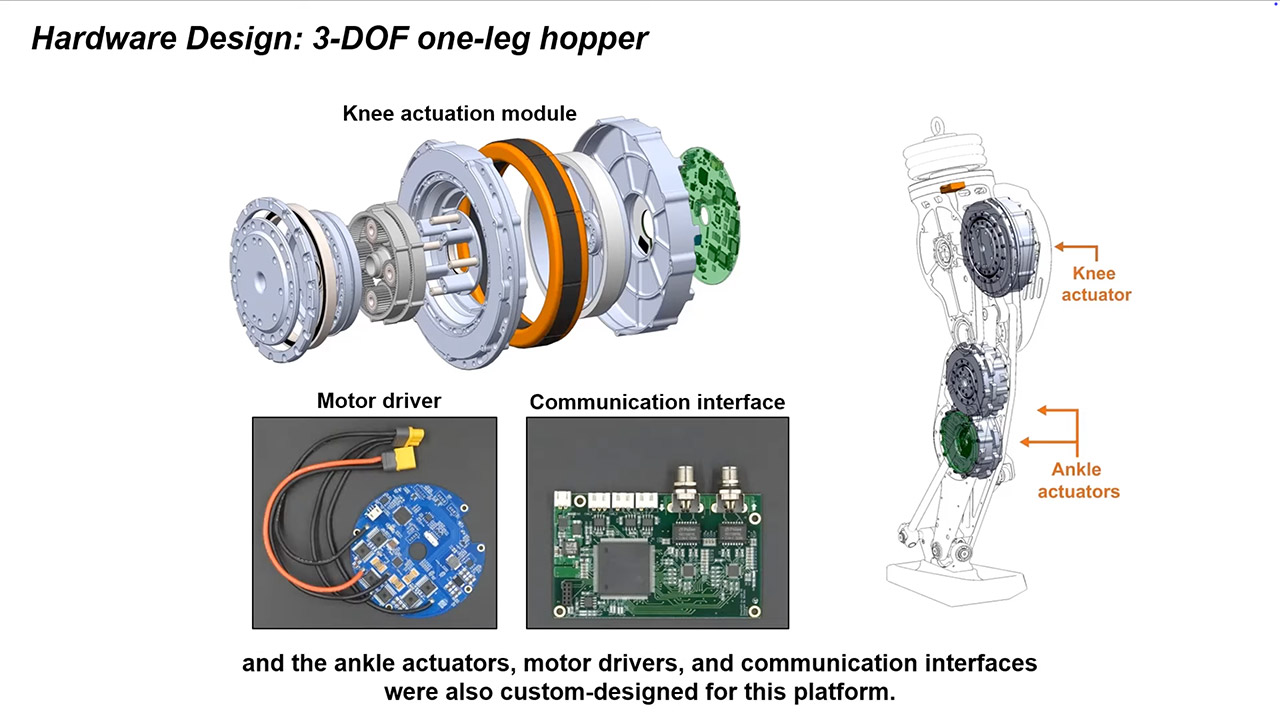
The leg bounds forward, each hop guided by its 3-DOF (degrees of freedom) design—one knee actuator and two ankle actuators working in harmony. The custom hardware, with its detailed actuation modules and communication interfaces, allows real-time adjustments, letting the robot adapt to uneven surfaces or slight missteps. This adaptability stems from a neural network trained via deep reinforcement learning, a process that turns each hop into a lesson for the next.
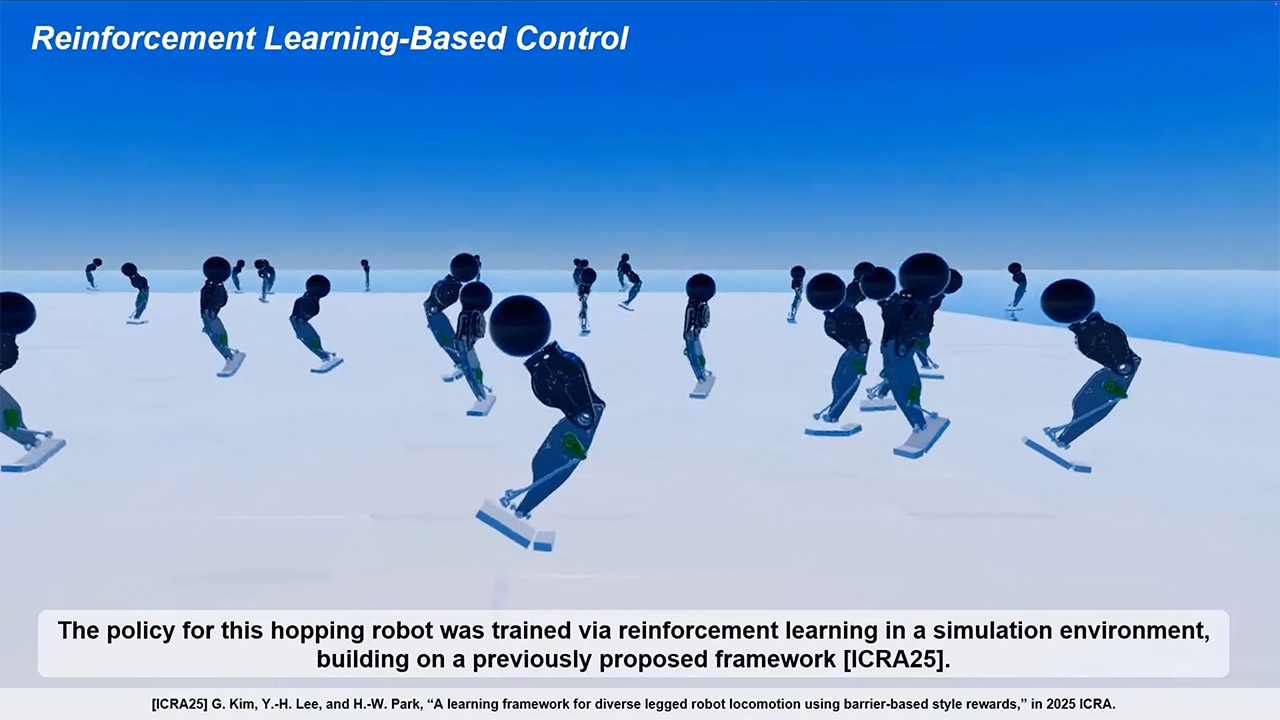
Mid-air, it adjusts on the go, shrugging off tiny shifts in weight or surface quirks. This nimbleness stems from what the team calls a “data-driven approach to agile hopping.” Their arXiv paper details how the robot uses live feedback to polish its hops, getting sharper with every bound. It’s like it’s learning to dance one step at a time.
For now, a linear guide at its base keeps it locked to a straight path, stopping it from toppling sideways while the team hones its forward groove. The leg’s built to be just heavy enough for stability but light enough to hop efficiently, with electric motors dishing out precise torque to each joint. Forget polished looks—this thing’s all business, rocking exposed wires and sensors like a badge of honor.
By nailing the mechanics of a single leg, the DRCD Lab is sketching a playbook for leaner, cheaper, and more nimble control systems that could make tomorrow’s robots lighter on their feet—and easier on the wallet.
[Source]







