MIT researchers unveil RialTo, an innovative new system for enhancing real-world imitation learning policies for home robots via reinforcement learning in “digital twin” simulation environments constructed on the fly from small amounts of real-world data.
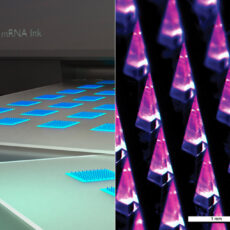
The real-to-sim-to-real pipeline takes advantage of the iPhone’s easy-to-use interface for quickly scanning and constructing digital twins of real-world environments. A novel “inverse distillation” procedure was then used by the researchers to bring real-world demonstrations into simulated environments for efficient fine-tuning, with minimal human intervention and engineering required.

- Live Stream from Anywhere with Pan/Tilt: Sharp and clear 1080p Full HD provides high quality video right in the palm of your hand. Camera is operated...
- Real-Time Motion/Sound Detection: Get alerts on your smart phone whenever motion or sound is detected even at night (30ft). Enable patrol mode on your...
- No Subscription Storage Option: EC70 mini camera continuously records and stores footage or video clips on a local MicroSD card up to 256 GB (sold...

We evaluate RialTo across a variety of robotic manipulation problems in the real world, such as robustly stacking dishes on a rack, placing books on a shelf and four other tasks. RialTo increases (over 67%) in policy robustness without requiring extensive human data collection,” said the researchers.