Jensen Huang introduced the new reference design during NVIDIA’s GTC event in Taipei on May 31. The package combines a full humanoid body, onboard computing hardware, and a complete set of software tools under the Isaac GR00T name. Research groups now receive one integrated starting point instead of piecing together separate parts from different suppliers.
The physical robot is based on the Unitree H2 Plus chassis. That machine stands around six feet tall, weighs about 150 pounds, and contains 31 joints for moving around, bending, and reaching. NVIDIA also included a pair of sets of Sharpa five-fingered hands, which provide another 22 joints for a total of 53 degrees of movement. Those hands enable for extremely cautious object handling, something that simpler grippers simply cannot achieve.

- Three models, one lightweight platform R1 Air (20 DOF, monocular camera), R1 (26 DOF, binocular camera, head+waist joints), and R1 Edu (26 DOF...
- Easy setup – no coding required for basic use Unbox, power on, and start. Manual teaching feature: physically pose the robot, and it replays the...
- More DOF = more expressive movement 26‑DOF models (R1 / R1 Edu) add head and waist articulation for smoother dance and running. For safety reasons...
Sensors are strategically positioned throughout the robot to provide it with awareness of its surroundings and location in the world. It has a stereo camera in the head that provides a good vision, wrist-mounted cameras for close-up work, and an inertia sensor to monitor balance and motion. The legs can generate up to 360 Newton-meters of torque, while the arms can produce 120, which isn’t bad. Each arm is certified for a seven-kilogram payload, with maxima of up to 15 kilograms for extremely big lifts.
The NVIDIA Jetson AGX Thor T5000 module powers and processes the robot. This thing packs a Blackwell graphics processor that can manage over 2,000 FP4 teraflops of AI work, plus a 14-core Arm processor and a generous 128 gigabytes of shared memory, and the best part is it all runs on between 40 and 130 watts, so it’ll happily run for several hours on the onboard battery pack. It also includes Ethernet, Wi-Fi 6, Bluetooth, USB ports, microphones, and speakers for voice contact. There is also a remote emergency stop to ensure safety.
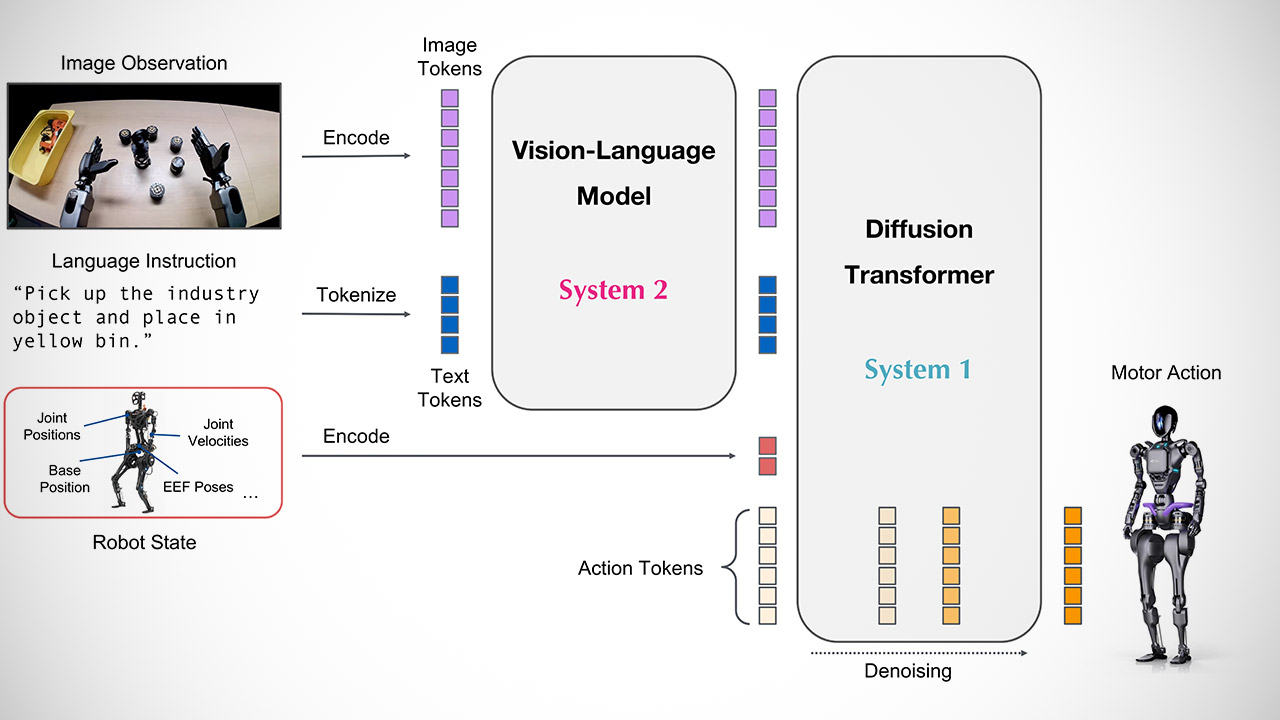
The software side of the equation is where the magic happens, as teams gain access to a multitude of open models developed for robot thinking, learning, and managing a variety of jobs simultaneously. These models can take spoken directions, camera images, and body location data and generate movement instructions. The teams can utilize both prior versions and the most recent N1.7 release, which were trained on a combination of robot demos and a large amount of human film, so everything transfers rather well across different machines. The models can take a variety of inputs, do some reasoning, and then return some movement orders.

The data collecting tools are quite useful for researchers because they can capture motion examples remotely or directly from the sensor data. These recordings can then be used to either adjust the model or train it. NVIDIA Isaac Sim then simulates the changed behavior in a virtual environment, allowing teams to verify safety and performance without burning out the hardware. Once they get the desired results, they can move them to the physical robot utilizing Isaac ROS tools and run them in real time on the Jetson computer.
This full chain is a significant improvement over the typical fragmented approach, as labs no longer need to create special bridges between hardware, simulation, and control software for each new experiment. The design is still quite flexible, allowing groups to adopt the entire stack or simply swap in the portions that match their present work. Support is already being expanded to the smaller Unitree G1 robot, and similar procedures are being moved to public repositories.
By late 2026, the complete reference design should be in the hands of research teams. The full specifications and accompanying documents are already accessible on NVIDIA’s developer site, and the code and model checkpoints are being made available via public repositories. Early adopters can begin planning their experiments and data pipelines right away, as the gear ships.







