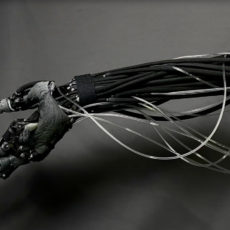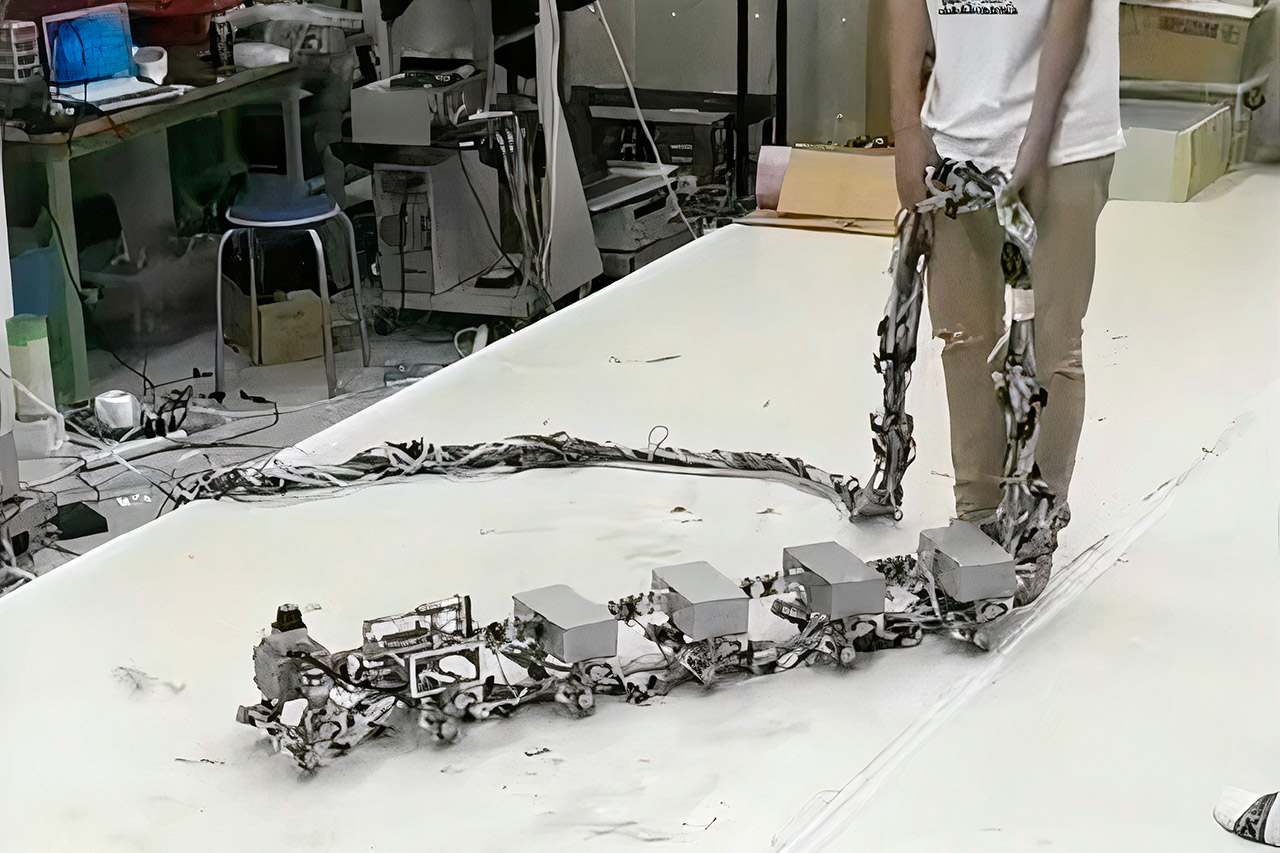
Researchers from Osaka University have developed a robot centipede, called Myriapod, that uses its six segments with flexible joints to convert walking in a straight line into curved motion. Unlike this robotic caterpillar, Myriapod’s six segments has two legs connected to each one and uses motors to modify their flexibility during the walking motion.
By simply increasing the flexibility in its joints, pitchfork bifurcation ensued, in which straight walking becomes unstable. The robot then transitions into a curved pattern, either to the right or to the left, resulting in more efficient maneuverability. Since pitchfork bifurcation does not directly steer the movement of the body axis and just controls the flexibility, it greatly reduces both the computational complexity as well as the energy requirements.



We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets. We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” said Mau Adachi, Co-Author of Study from Osaka University.