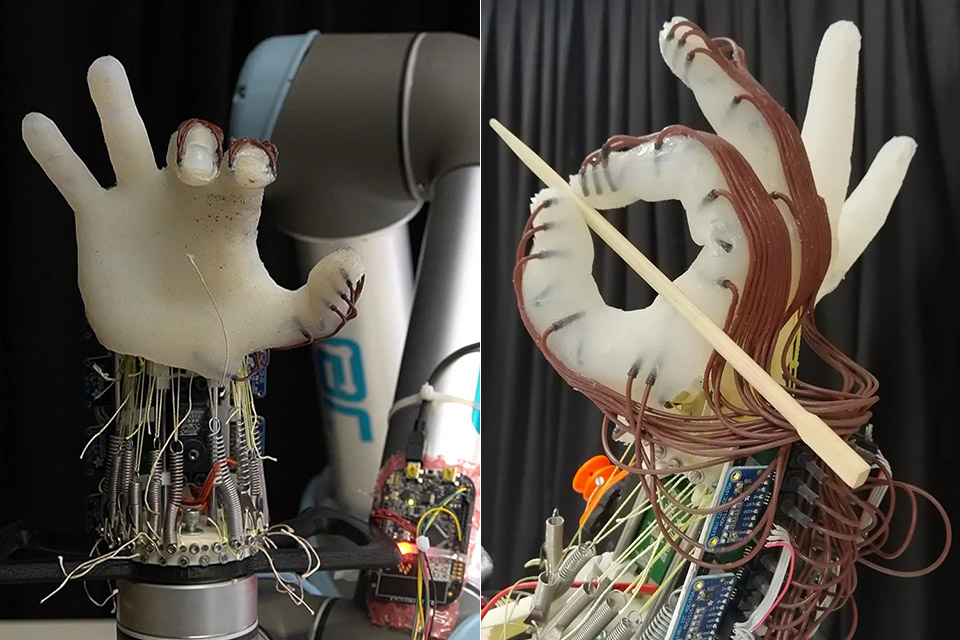
University of Cambridge researchers have designed a soft, 3D-printed robotic hand capable of using its skin-covered fingers to accurately grip objects. It was trained to grasp different objects and able to predict whether if something would be dropped by using the information provided by the sensors on its skin.
This 3D-printed anthropomorphic hand implanted with tactile sensors enabled it to sense what was being touched. The team carried out more than 1200 tests with the robot hand, observing its ability to grasp small objects without dropping them. Trial and error was required to to learn what kind of grip would be successful. So after training with the balls, it then attempted to grasp different objects like a peach, a computer mouse and a roll of bubble wrap.

- Resume Printing Function: no worry to the immediate power outage or electric circuit error, Ender 3 has the ability to resume printing even after a...
- Creality Ender 3 3d printer, it is the most basic 3d printer model, more students and beginners can learn the 3d printer by this model, it can help to...
- Advanced Extruder Technology: Ender 3 upgraded extruder greatly reduces plugging risk and bad extrustion; V-shape with POM wheels make it move...

In earlier experiments, our lab has shown that it’s possible to get a significant range of motion in a robot hand just by moving the wrist. We wanted to see whether a robot hand based on passive movement could not only grasp objects, but would be able to predict whether it was going to drop the objects or not, and adapt accordingly,” said Dr Thomas George-Thuruthel, co-author from the University College London (UCL) East.