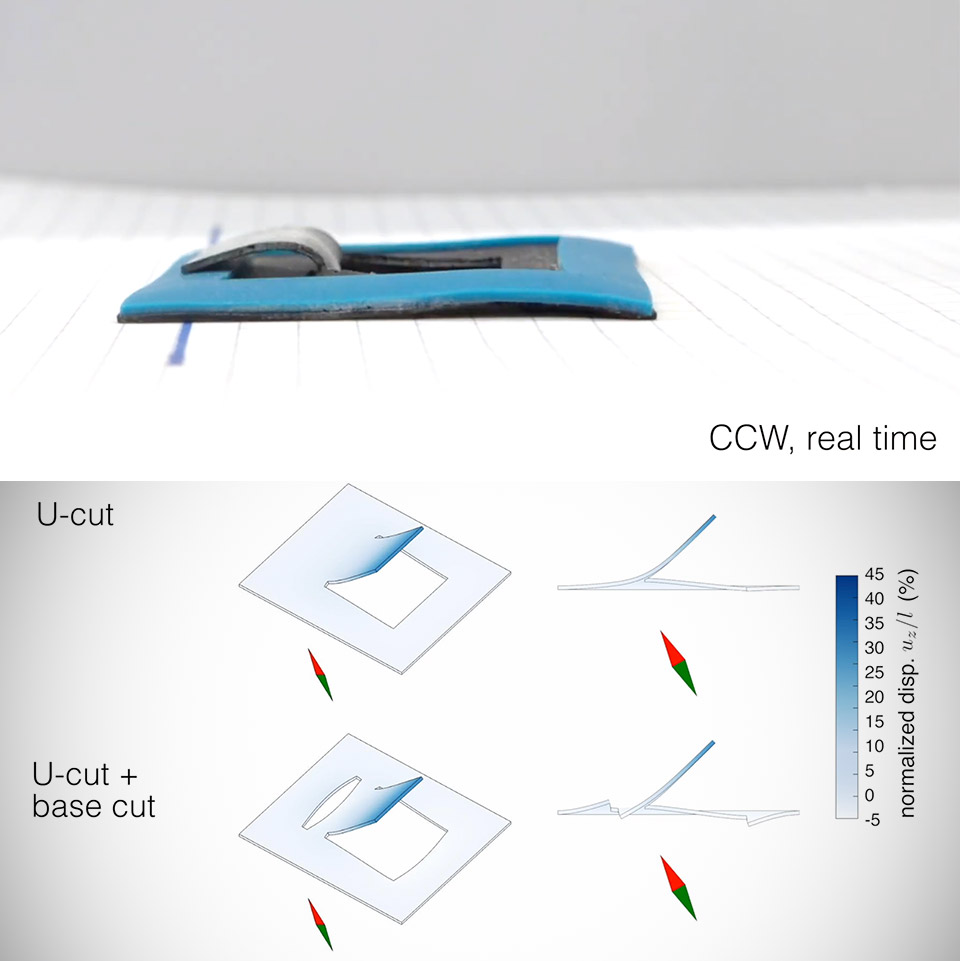
Researchers from SDU (DK) and ETH (CH) Zurich have developed a soft magnetic kirigami robot that can crawl forward and backward using rotating magnetic fields. The clockwise as well as counterclockwise rotating magnetic fields with distinct locomotion patterns enable the robot to crawl with forward and backward propulsion.
What the team discovered was that by changing the shape of the cuts and orientation of the magnet, the robot can be steered. If combined with the translational motion of the magnet, complex crawling paths are able to be programmed. This is more a proof of concept than a robot that can be used for practical applications, or at least for now.

- Automatic Conversion: Transforms effortlessly between truck and robot modes via voice command or mobile app.
- Programmable: Use the dedicated app to create and customize various movements and poses, enhancing your interactive experience.
- Interactive Features: Equipped with multiple sensors and voice commands, providing an engaging and immersive experience.

The proposed magnetic kirigami robot offers a simple approach to developing untethered soft robots with programmable motion,” said the researchers.
[Source]