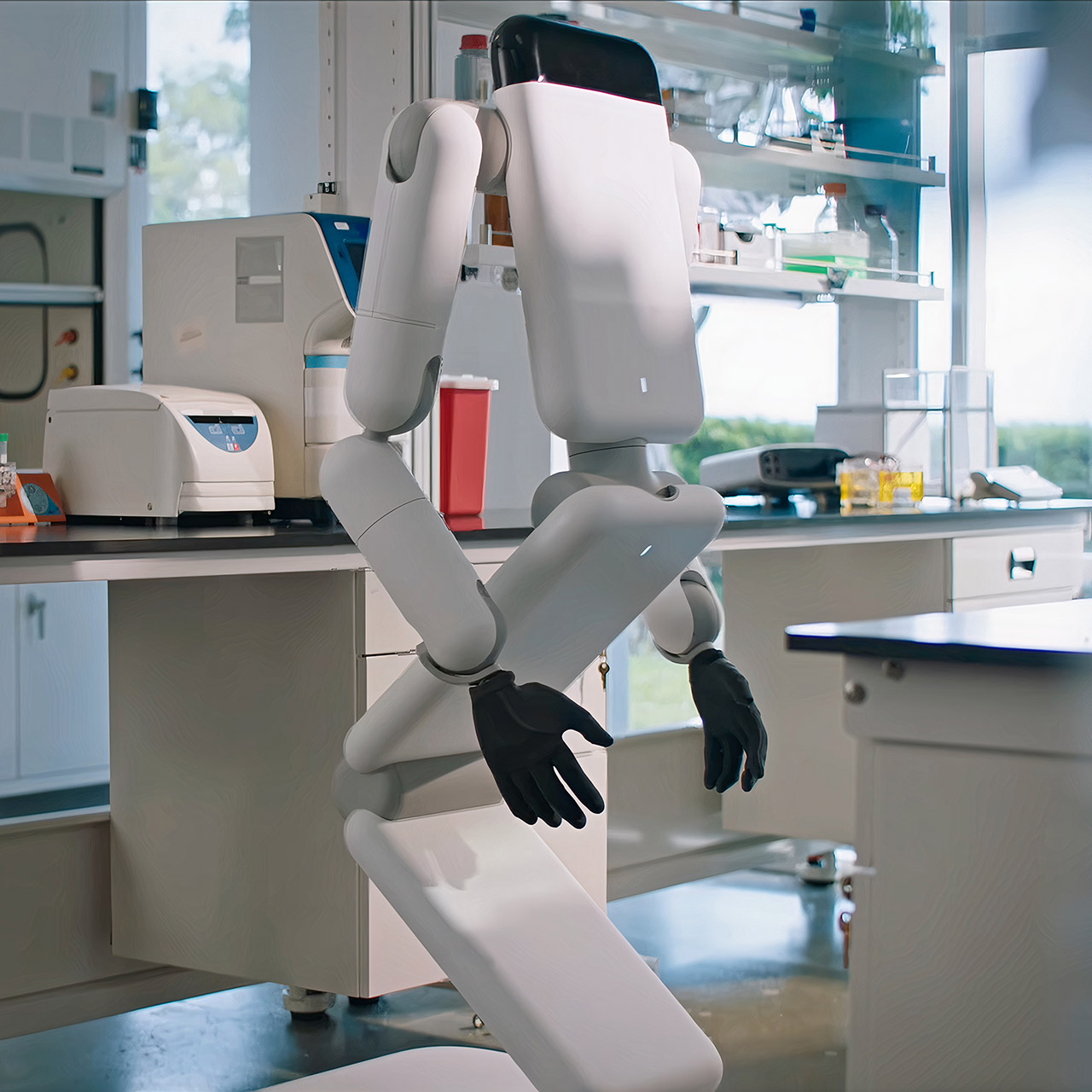
Genesis AI introduced Eno this month as its first general-purpose robot, and the machine immediately stands apart from nearly everything else in the crowded field. It rolls on a wheeled base rather than walking on legs. A compact tower of articulated panels rises and tilts to set the working height and reach, then folds down tight when the job ends. Two arms carry hands that match human size and proportion almost exactly. There is no head, no face, and no attempt to hide the fact that this machine was never meant to pass for a person.
The team’s design choices began with a simple question: what does this robot need to accomplish its job properly in settings where people already work? The areas it will be working, those flat factory floors, lab benches, hospital halls, and eventually even home, are all very flat, and let’s be honest, they rarely demand climbing up and down stairs or balancing on two feet. So a wheeled foundation makes sense in those circumstances since it requires less energy and is much more sturdy. However, the folding panels tell a different story. When the robot has completed a task, it can fold itself up and roll into a corner or storage area without taking up too much space or calling too much attention to itself.

- Three models, one lightweight platform R1 Air (20 DOF, monocular camera), R1 (26 DOF, binocular camera, head+waist joints), and R1 Edu (26 DOF...
- Easy setup – no coding required for basic use Unbox, power on, and start. Manual teaching feature: physically pose the robot, and it replays the...
- More DOF = more expressive movement 26‑DOF models (R1 / R1 Edu) add head and waist articulation for smoother dance and running. For safety reasons...
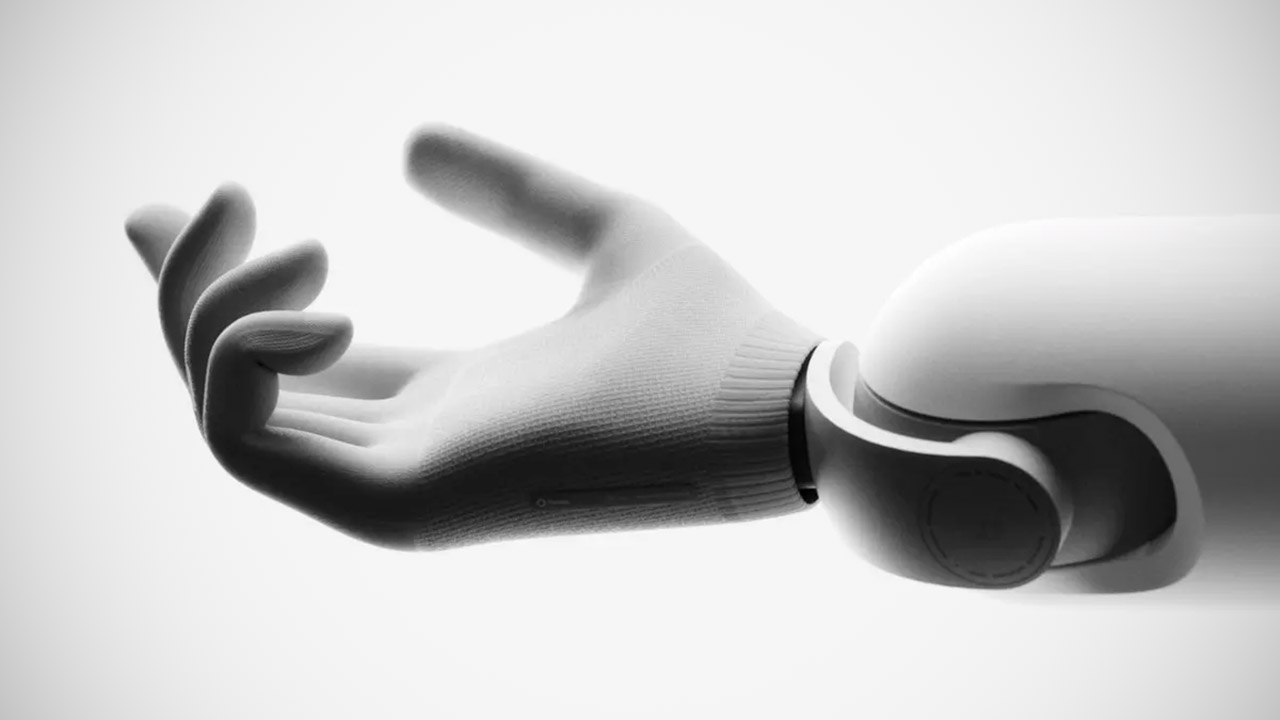
The hands receive the most attention because each has approximately twenty degrees of mobility and fingers of varied lengths that reflect the way real fingers are configured. The joints are back-drivable, so when Eno makes contact with something, they yield slightly rather than locking in place. The robot’s fingertips and palms contain miniature cameras and tactile sensors, allowing it to see and feel what it is touching. In early demos, the hands allowed Eno to accomplish things like tape up wire bundles, catch its own slides, and move liquids between containers without requiring any additional assistance or adjustments to the equipment surrounding it.

It has a payload capacity of three to five kilograms per arm, which is sufficient for most light assembly, stocking, and lab-support duties. Battery life is now between four and six hours under normal workloads, but the team is continuously working to improve it. When Eno desires, the entire upper structure can stretch up to adult height and then fold back down to a much smaller size.
All of this hardware is compatible with GENE, Genesis AI’s own foundation model created exclusively for robotics. The system treats Eno as a single, coherent unit, rather than a collection of distinct elements that require regular human interaction. It may look at a larger goal, break it down into steps, adjust when circumstances change, remember what has previously occurred, and simply carry the work through to completion on its own. This is a significant improvement over the conventional pattern of single, pre-programmed movements, allowing Eno to handle larger sequences of activity that last minutes or hours. Genesis AI created both the robot and the model simultaneously, as evidenced by how well the body and brain work together. The optional screen version has a little display on the upper panel that allows those close to see what Eno is currently thinking or intending, eliminating the need for them to guess or interpret its actions.

Customer deployments are scheduled to begin with industrial sites in manufacturing, logistics, and laboratories by the end of 2026, with service contexts like as hotels and hospitals following later, and, if all goes well, consumer settings. Eno is still in the early stages of development, with work being done on the battery, payload, and overall robustness. A legged version is still viable if there is a demand for it later on, but the company’s first focus is on the wheeled method.
[Source]









