
Sure, Boston Dynamics’ Spot robot can survey the ruins of Pompeii, but this quadruped robotic dog goalkeeper is probably more skilled than most humans at saving shots. That’s right, an international team of researchers developed a reinforcement learning (RL) framework that enables quadrupedal robots to perform soccer goalkeeping tasks in the real world.
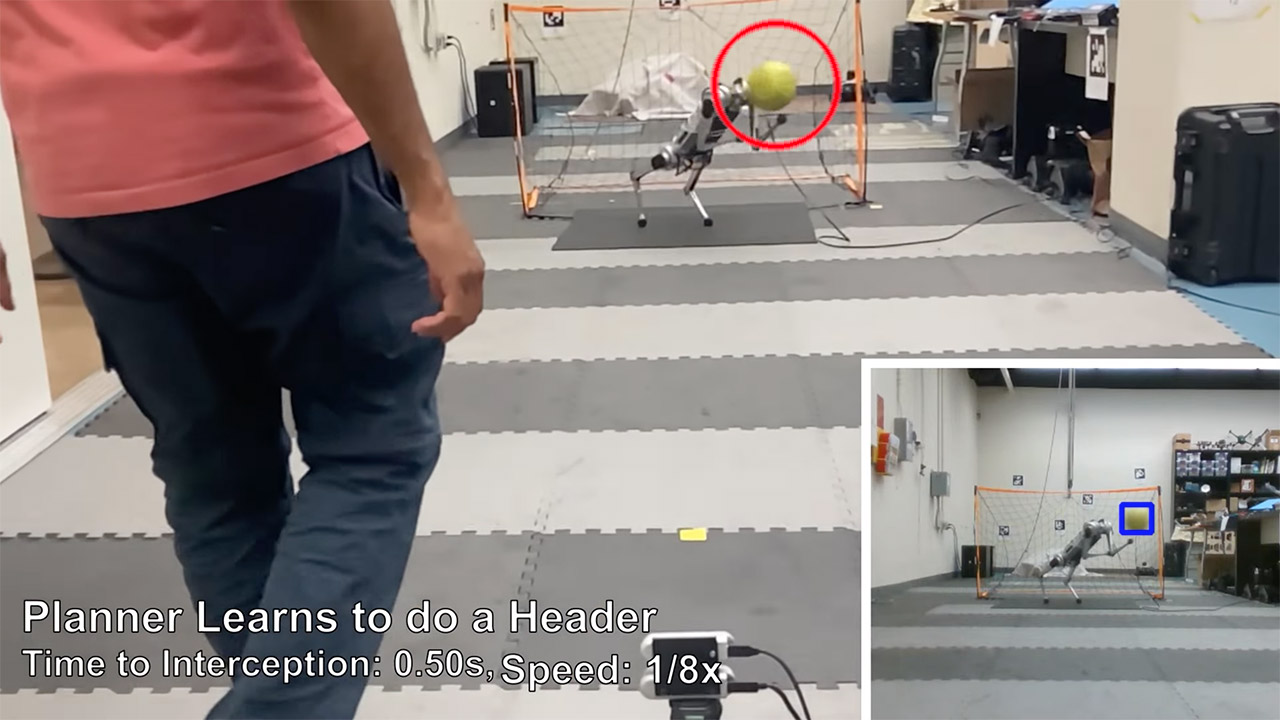
The biggest challenge is for the robot to accurately react and intercept a flying ball using dynamic locomotion maneuvers in a very short amount of time, typically less than one second. This is where multiple control policies for distinct locomotion skills comes in. They can be used to cover different regions of the goal, while each control policy allows the robot to track random parametric end-effector trajectories as they perform one specific locomotion skill, like jumping, diving, and sidestepping.

- Fascinating Design - Capture the true essence of Real Madrid with this fascinating Santiago Bernabéu soccer stadium LEGO building set for adults
- Authentic Details - Spot all the authentic details of the scale model version of the stadium including the soccer field, goals, dugout, tunnel...
- Removable Roof Model - A collector's model building kit for adults with a removable roof: the model splits in half allowing you to view the inside
These skills are then utilized by the second part of the framework which is a high-level planner to determine a desired skill and end-effector trajectory in order to intercept a ball flying to different regions of the goal. We deploy the proposed framework on a Mini Cheetah quadrupedal robot and demonstrate the effectiveness of our framework for various agile interceptions of a fast-moving ball in the real world,” said the researchers.



