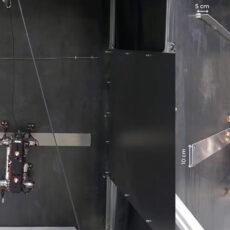
Here’s a first look at Drosophibot II, an unusual biomimetic fruit fly robot modeled after an adult fruit fly, Drosophila melanogaster. Not just a static robot, this one actually pays close attention to the kinematics and dynamics of its insect counterpart, an increasingly important model of legged locomotion.
Each one its legs has the proportions and degrees of freedom that match the Drosophila 3D pose estimation data. This resulted in the researchers developing a program to automatically solve the inverse kinematics necessary for walking as well as solve the inverse dynamics necessary for mechatronic design. By applying this solver to a fly-scale body structure, they managed to demonstrate that the robot’s dynamics fit those modeled for the fly.

- Build your own awesome, wearable mechanical hand that you operate with your own fingers.
- No motors, no batteries — just the power of air pressure, water, and your own hands!
- Hydraulic pistons enable the mechanical fingers to open and close and grip objects with enough force to lift them. Every finger joint can be adjusted...

This robot will be used to test biologically inspired walking controllers informed by the morphology and dynamics of the insect nervous system, which will increase our understanding of how the nervous system controls legged locomotion,” said the researchers.
[Source]